本文
自動運転レベル4に向けた取組み
四條畷市田原支所では、地域の皆さまとともに地域課題の解決に向けた取組みを行っています。
その一つとして「地域内移動支援(交通)」を目的に、令和2年度から自動運転車を導入し運行を行っています。
また、令和6年度から「自動運転レベル4」に向けた取組みとして「路車協調システム」と「遠隔監視システム」の実証実験を行い、レベル4自動運転の許認可取得に向けて課題抽出し、より安全・快適な運行をめざします。
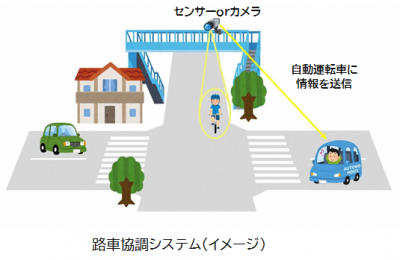
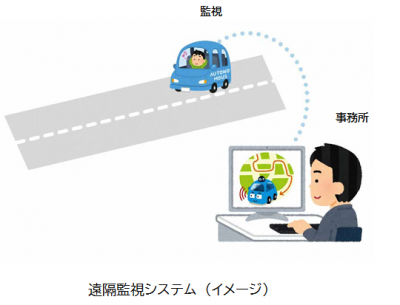
【路車協調システムと遠隔監視システムとは】
路車協調システム・・・見通しの悪い道路にセンサやカメラを設置し、車両と情報共有する仕組み
遠隔監視システム・・・運行車両の状況を遠隔監視センターにてリアルタイムで監視・確認する仕組み
令和7年度は、令和6年度の実証実験による課題を踏まえ「路車協調システム」の精度の向上を図りました。
また、監視センターでは車内外の状況等を遠隔で監視し、自動運転車のボタン操作等の走行支援を行うことで走行を補完する「遠隔アシスト」の実証実験を実施しました。
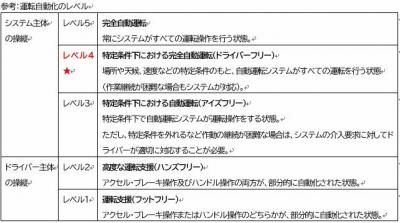
自動運転レベル4とは?
ドライバーなしで走行する状態で、場所や天候、速度などの特定条件のもと、自動運転システムが主体となって車を操縦し制御を行います。高齢化や人口減少が進む地域において、ドライバーがいない状態でも車両の運行ができるため、ドライバーや便の確保等に課題がある地域でも交通の利便性が向上し誰もが外出しやすくなることが期待されます。 自動運転レベル4の車両では、運転に必要なドライバーの能力(認知、予測・判断、操作)を、自動運転システムが替わって行います。カメラやレーダーなどのセンサで周囲の状況を認知し、AIや電子制御装置などで次に起こりうることを予測しつつ、安全な運転方法を判断し適切に操作を実行します。
【令和7年度】 自動運転レベル4に向けた実証実験概要
遠隔アシスト実証実験
現状ではすべて運転手とシステムが実施している安全確認と出発判断を遠隔で監視スタッフが限定的にアシスト(援助)し、自動運転機能を組み合わせて運転の継続化を図ります。
路車協調システム実証実験【国土交通省 道路局】
令和7年度は対向車線側の検知範囲の拡大と右折流出側の車載センサの増設および路側センサの設置を行い、 令和6年度に抽出した課題を踏まえ、路車協調システムの改善、長期間設置した際の不具合・対応策等を把握します。
令和7年度実証実験詳細はこちら→令和7年度実証実験概要 [PDFファイル/1.13MB]
【令和6年度】路車協調システム及び走行空間の技術的検証を目的とした自動運転実証実験(国土交通省 道路局)
路車協調システム実証実験【国土交通省 道路局】
見通しの悪い交差点を右折する場合等、車載センサでは捉えきれない対向車線の車両等の動向を道路側に設置したセンサ類で検知します。自動運転車は車載センサと道路側のセンサ類で検知した情報をもとに自動制御で通行します。
令和6年度実証実験詳細はこちら→令和6年度路車協調システム実証実験概要 [PDFファイル/2.02MB]
【令和6年度】地域公共交通確保維持改善事業補助金(自動運転社会実装推進事業)(国土交通省 自動車局)
遠隔監視システム実証実験【国土交通省 自動車局】
遠隔監視システムを導入し、遠隔から車内外の映像・音声・位置情報をリアルタイムで監視するとともに、遠隔監視センターのモニター画面を記録する。
詳細はこちら→令和6年度遠隔監視システム実験内容 [PDFファイル/1.18MB]
レベル4モビリティ・地域コミッティについて
地域コミッティとは、地方公共団体・関係行政機関・事業者による綿密な連携体制を構築することで、地域の受容性醸成を図りつつ手続きの透明性・公平性を確保し、各地のレベル4自動運転サービスの実現を加速するための協議体です。本市においても「大阪府四條畷市レベル4モビリティ・地域コミッティ」を設置しています。
会議開催状況
令和7年度
大阪府四條畷市レベル4モビリティ・地域コミッティ構成員名簿 [PDFファイル/237KB]
会議
開催日:2025年7月7日(月曜日)
開催方法:現地・Web
資料:01大阪府四條畷市レベル4モビリティ・地域コミッティ会議次第
02大阪府四條畷市レベル4モビリティ・地域コミッティ会議資料


中間報告会
開催日:2025年12月22日(月曜日)
開催方法:現地・Web
資料:01大阪府四條畷市レベル4モビリティ・地域コミッティ中間報告会次第 [PDFファイル/151KB]
02大阪府四條畷市レベル4モビリティ・地域コミッティ中間報告会資料 [PDFファイル/5.19MB]


最終報告会
開催日:2026年3月26日(木曜日)
開催方法:現地・Web
資料:01大阪府四條畷市レベル4モビリティ・地域コミッティ会議次第 [PDFファイル/158KB]
02大阪府四條畷市レベル4モビリティ・地域コミッティ会議資料 [PDFファイル/6.75MB]
03大阪府四條畷市レベル4モビリティ・地域コミッティ会議参考資料 [PDFファイル/1.44MB]


令和6年度
キックオフ会議
開催日:2024年8月30日(金曜日)
開催方法:現地・Web
資料:01大阪府四條畷市レベル4モビリティ・地域コミッティキックオフ会議次第
02大阪府四條畷市レベル4モビリティ・地域コミッティキックオフ会議資料

中間報告会
開催日:2024年11月8日(金曜日)
開催方法:現地・Web
資料:01大阪府四條畷市レベル4モビリティ・地域コミッティ中間報告会議次第




最終報告会
開催日:2025年3月21日(金曜日)
開催方法:現地・Web
資料:01大阪府四條畷市レベル4モビリティ・地域コミッティ最終報告会議次第 [PDFファイル/144KB]
03令和7年度事業について [PDFファイル/1.96MB]
04Kpi(重要業績評価指標) [PDFファイル/220KB]
ふるさと納税で取り組みを応援できます
田原地域で運行している自動運転車「たわらコネクトカート(TCC)」の自動運転レベル4に向けた実証実験には、皆さまからご支援いただいたふるさと納税の寄付金も活用しております。
ふるさと納税の寄付金の使い道選択において「先進的な試みへの支援」をお選びいただきますと、翌年度の自動運転等実装事業に活用されます。
本市の取り組みについて、ぜひご支援をお願いいたします。
Adobe Readerをお持ちでない方は、バナーのリンク先からダウンロードしてください。(無料)

